基于时空滤波方法的
多源遥感数据融合算法
神州信息
刘晶 李佳辉

1.
前言
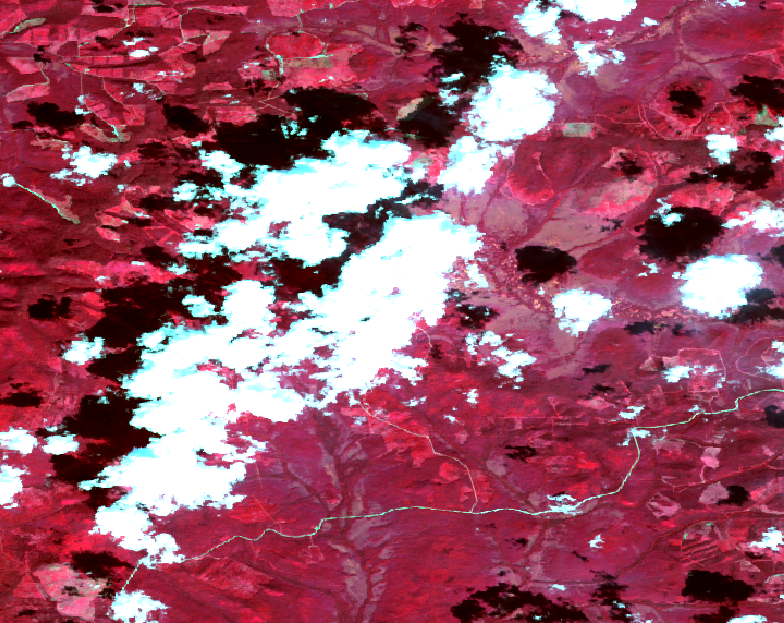
高时空分辨率遥感数据在监测土地变化、作物生长及物候参数反演等方面具有重要的作用,遥感数据的时空精细度成为了制约其在各领域应用的重要因素。 受技术限制的影响,传感器在获取地面数据时通常难以同时兼顾到数据的空间分辨率和时间分辨率。对于高时间分辨率的数据可以得到丰富的地表细节信息,但由于其重访周期长,再加上地面气象因素( 云、雨和雪等) 对传感器成像的影响,造成了单个传感器有效数据重访周期的延长,使得监测具有很大程度上的“时空数据缺失”,导致监测研究中基础观测数据出现“空窗”,在研究的关键期不能满足连续动态跟踪监测的要求。而对于低分辨遥感影像数,虽然具有较高的时间分辨率,但是其空间分辨率太低,对于我们监测较小面积种植作物区域具有很大影响。
为满足地表信息遥感动态监测同时对具有高空间分辨率和高时间分辨率特征遥感数据的需求,一些学者提出了一种能够综合高空间分辨率遥感数据的空间分辨率特征和高时间分辨率遥感数据的时间分辨率特征的技术,即遥感数据时空融合技术。
2.
多源时空数据融合技术
针对遥感数据时空融合方法,国内外学者进行了大量研究。根据算法原理的不同,遥感数据时空融合方法可以分为2类,即基于变换的模型和基于像元重构的模型。国内外大部分遥感数据时空融合模型是基于像元分解重构技术的,其基本思想是通过一定的规则选择目标像元周边的像元参与目标像元的重构。常用的时空融合方法有STARFM(Spatial and Temporal Adaptive Reflectance Fusion Model)和ESTARFM(Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)两种方法。
STARFM方法主要用于融合Landsat和MODIS影像, 生成与MODIS影像相应时间的模拟Landsat影像, 能较为准确地预测出高时空分辨率影像的反射率数据。但STARFM算法的预测结果受Landsat数据影响, 若Landsat影像中未记录地表覆盖在较短时间内的剧烈变化, 那么预测的影像也不会表征该情况,不能监测地表突变的情况。ESTARFM算法, 主要使用两期对应观测时间的高空间分辨率、低时间分辨率影像和低空间分辨率、高时间分辨率影像, 以及在预测日期获取的低空间分辨率影像获取对应时间的模拟高空间分辨率影像,该算法考虑了像元的异质性,引入纯净像元与混合像元在一段时间内反射率变化的转换系数, 提高了模型在异质性较高区域的反射率融合精度, 在小区域实验中有较好的效果,大区域效果还有待验证。这两种算法对于变化情况较大且未记录在基准影像的区域预测精度较低,且算法精度受基准影像的数据质量影响严重,如需构建大范围的无云数据,需要保证每一个区域都能找到无云覆盖的参考数据,这是非常困难的,特别是在大量云雾覆盖区域,一年内都极少有无云数据,具有一定的局限性,不能满足我们对全国范围内作物进行动态监测的需求。
对于作物监测,我们主要需要作物关键物候期的时序性的高分辨率遥感数据,那么为了满足我们的监测需求,具备全国作物动态监测的能力,我们自研了SSTARFM(Self-tuning spatiotemporal adaptive reflectance fusion model)的时空遥感数据融合算法,该算法基于权重滤波与多源数据归一化方法,根据不同尺度影像数据的时间空间特征,构建全时序、全空间范围内的无云长势产品,完成了多源异构数据的统一,在保证高精度的条件下输出高时间高分辨率的监测产品。
3.
SSTARFM多源数据时空融合方法
目前的时空融合算法大都是针对2种数据源的遥感数据进行融合,没有充分利用现有多源数据的优势,SSTARFM方法则基于目前我们常用的Sentinel2、Landsat8/9和MODIS 3种不同传感器的数据进行融合,提高了我们的监测精度。
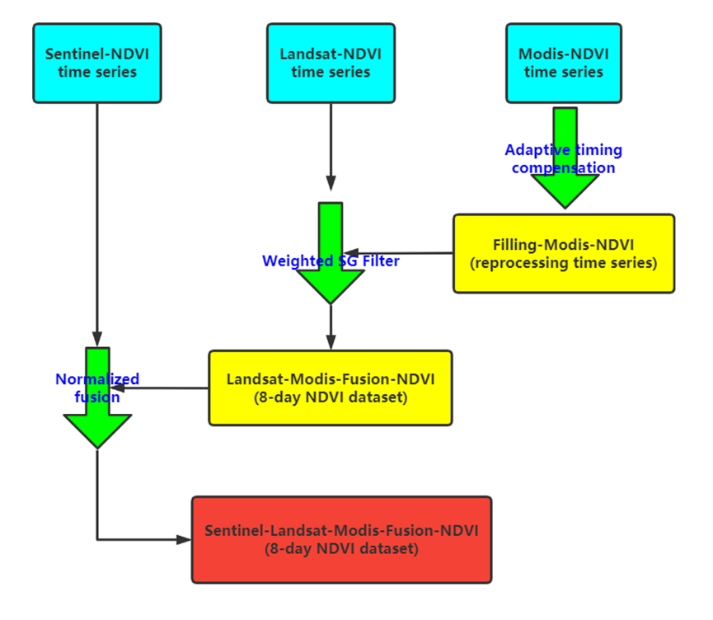
SSTARFM算法流程
该算法的特点是在填补空缺值的基础上,最大程度的保留了准确的原始数据。为了实现这种效果,需要对整个数据集经历两次时空滤波处理。时空滤波处理首先通过空间插值的方式填补单幅影像的空缺值,但这样填补出的空缺值只考虑的空间上的连续性,和真实值差异较大。因此需要使用时间滤波,以插值出的空间值为参考计算出在时间上的合理值。这种先空间后时间的方法既可以去除数据中的异常值的点,也可以在时空尺度上为空缺数据计算出一个相对合理的值。与STARFM算法不同的是,我们在空间维度基础上增加了时间尺度进行补值,增加了数据合理性和准确度,而且这种方法在长时间序列的数据重构上,随着可参考的时间样本增加,构建出的时序数据也会更加符合实际情况,精度更高。
本方法在实际应用的过程中,对于MODIS低分辨率数据,首先进行一次时空滤波处理,构建出一个相对完整的数据产品,其次采用卷积和图像补值的方法,构建Landsat和MODIS数据融合结果,然后再进行时空滤波处理,保证了融合数据在时间和空间上的合理性,最后将Landsat8-MODIS融合结果和Sentinel2数据构建回归模型,保证两数据源的协同统一。
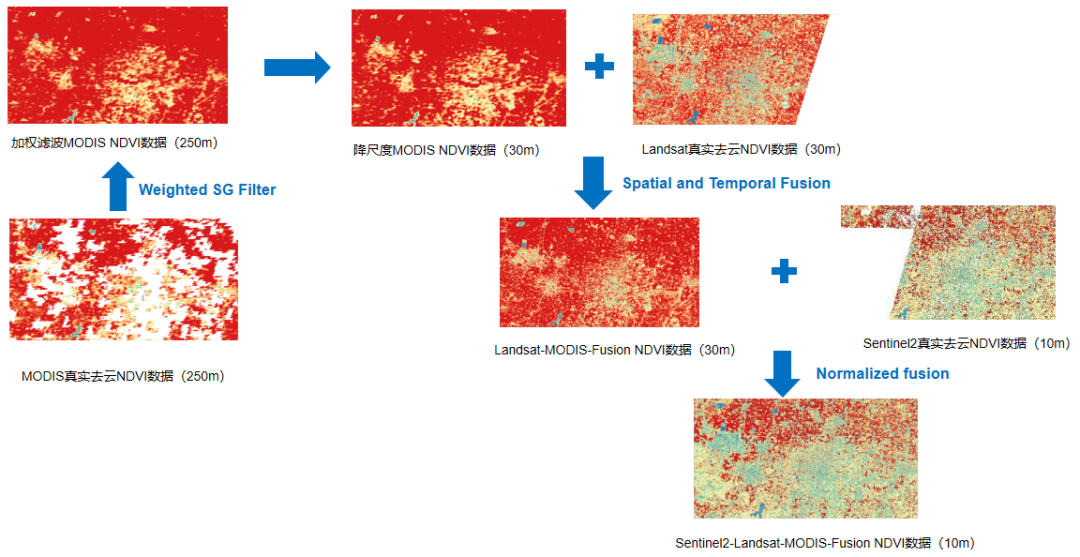
SSTARFM多源时空数据融合流程,注:示例数据为淄博市北部农田区域2022年03月06日数据
其中,双立方(三次)卷积插值是我们进行低分辨率数据降尺度的一个主要方式。双三次插值又叫双立方插值,用于在图像中“插值”(Interpolating)或增加“像素”(Pixel)数量/密度的一种方法。其主要原理为:双立方插值计算涉及到16个像素点,其中(i’, j’)表示待计算像素点在源图像中的包含小数部分的像素坐标,dx表示X方向的小数坐标,dy表示Y方向的小数坐标,通过图像16个像素点权重卷积之和即可计算得到新的像素值。具体如下图所示:
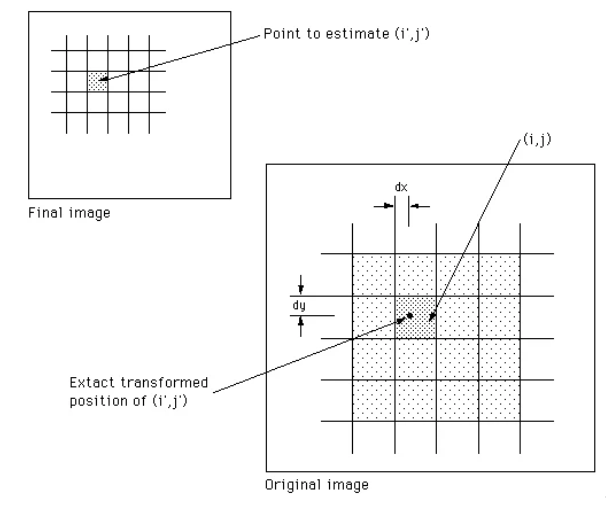
双立方(三次)卷积插值方法
基于SSTARFM算法,我们已经具备生产8天一期10m分辨率的NDVI数据的能力,实现对作物区域进行8天1次的生长监测,提高了农情监测的时间颗粒度,可以做到对异常情况的及时反映,保障了农民的生产和财产安全,为政府部门的快速决策提供数据支撑。同时,SSTARFM时空融合算法解决了监测研究中基础观测数据出现“空窗”的问题,能够为农业上作物面积监测、长势、产量、苗情、土壤墒情、作物收割、成熟度、气象灾害、虫害等监测模型的构建提供强有力地数据支撑,为农田的精准监测提供保障。

神州信息遥感农情监测模型
4.
结语
在当前单一传感器数据不能满足各领域动态监测对于高时空分辨率遥感数据需求的情况下,如何融合遥感数据综合利用多源数据的特性和优势,具有重要的理论意义和应用价值。SSTARFM多源数据融合方法是一种具有良好性能的遥感时空融合算法,可以解决当前光学遥感数据空间分辨率和时间分辨率上相互制约的问题,其发展及应用前景十分广阔。